-
1 возможность действовать в обход автоматики
Авиация и космонавтика. Русско-английский словарь > возможность действовать в обход автоматики
-
2 кнопка управления шасси в обход автоматики
Aviation: landing gear override triggerУниверсальный русско-английский словарь > кнопка управления шасси в обход автоматики
-
3 пульт ручного управления в обход автоматики
Engineering: manual override panelУниверсальный русско-английский словарь > пульт ручного управления в обход автоматики
-
4 ручка управления в обход автоматики
Aviation: override handleУниверсальный русско-английский словарь > ручка управления в обход автоматики
-
5 ручное управление в обход автоматики
1) Construction: manual override control2) Oil: manual overrideУниверсальный русско-английский словарь > ручное управление в обход автоматики
-
6 система ручного управления в обход автоматики
Aviation: manual override control leverУниверсальный русско-английский словарь > система ручного управления в обход автоматики
-
7 возможность действовать в обход автоматики
Русско-английский авиационный словарь > возможность действовать в обход автоматики
-
8 возможность действовать в обход автоматики
Русско-английский аэрокосмический словарь > возможность действовать в обход автоматики
-
9 управление (упр.)
control (ctl)
-, аварийное — emergency control
-, автоматическое — automatic control
-, автономное — independent control
-, безбустерное — unassisted control, unpowered control
-, боковое (полетом в горизонтальной плоскости) — lateral control
-, бустерное — power(ed) control
-, бустерное (необратимое) (рис. 20) — power-operated control
при необратимом бустерном управлении поверхность управления отклоняется электрическим или гидравлическим приводом, без приложения физических усилий летчика. — in power-operated control the surface is moved electriсally or hydraulically with pilot's physical effort making no contribution.
-, бустерное (обратимое) (рис. 20) — power-boost control
при обратимом бустерном управлении поверхность управнения отклоняется электрическим или гидравлическим приводом и физическим усилием летчика. — in power-boost control, force needed to move surface is provided partly electrically or hydraulically and partly by pilot's physical effort.
- воздушным движением (увд) — air traffic control (atc)
управление возд. движением направлено на предупреждение возможных столкновений ла между собой и препятствиями в зоне аэродрома, обеспечения регулируемого движения ла в зонах увд. — a service provided for the purpose of: preventing collisions between aircraft, and on the maneuvering area between aircraft and obstructions, and expediting and maintaining an oderly flow of air traffic.
- выстрелом (катапультного кресла) — seat ejection control
- газом (двигателя) — throttle control
- газом двигателя, раздельное — separate throttle control (for each engine)
-, гидравлическое — hydraulic control
- двигателем — engine control
- двигателем (органы управления) — engine controls
- двигателем (система) — engine control system
-, двойное — dual control
-, директорное (с помощью системы директорного управления) — flight director control
-, дистанционное — remote control
any system of control performed from a distance.
-, дифференциальное — differential control
- зажатое (о ручке или штурвальной колонке управления самолетом) — fixed stick
- закрылками — flap control
- заходом на посадку — approach control
-, кнопочное — push-button control
- конусом воздухозаборника — air intake spike control
- (комитет) контроля программ техобслуживания (при фаа) — (faa) maintenance review board (mrb)
- креном, ручное — manual bank /aileron/ control
- курсовое — directional control
- 'механизацией компрессора — compressor control system
- на переходном режиме — control in transition
- необратимое — irreversible control
-, ножное — foot /pedal/ control
- 'носовым колесом — nosewheel steering (nose wheel steer)
- обратимое — reversible control
- общим шагом (несущего винта) — collective pitch control
управление о.ш. обеспечивоет одинаковое изменение шага всех лопастей несущ. винта независимо от их аэимутального положения. — collective pitch control provides equal alteration of blade pitch angle impossed on all blades independently of their azimuthal position.
-, освобождение (о ручке или колонке управления самолетом) — free stick
- от (посредством) автопилота — autopilot control
- относительно поперечной оси — longitudinal control
- относительно трех осей координат — three-axis control
- парашютом — parachute steering
-, педальное — pedal control
- передней опорой (шасси) — nosewheel steering (nosewheel steer, nlg steer)
- переключением шин (эл.) — tie bus control
- переставным стабилизатором, автоматическое (автоматом перестановки стабилизатора апс) — stabilizer /tailplane/ trimming (stab trim)
- поворотом колес (передней опоры шасси) — nosewheel steering (control)
колеса передней опоры управняются гидравлически для изменения направления движения ла на земле. — the nosewheel steering is hydraulically actuated to provide directional control of the nose wheel(s).
- поворотом колес передней стойки педалями руля направления — rudder pedal nosewheel steering
- пограничным слоем (упс) — boundary layer control (blc)
один из способов увеличения подъемной силы крыла, осуществляемый путем отсасывания или сдувания пограничного слоя. — the boundary layer is contrailed by using either a pressure to act as a leading edge slot, of a suction to remove a portion of the boundary layer. the general purpose of blc is to obtain greater control over lift and drag forces.
- пo директорным (командным) стрелкам (директорных приборов) — (flight) control by using display of command bars
- по крену — roll /bank/ control
- пo курсу — directional control
- полетом (ла) — flight control
- полетом (ла) по углу — aircraft attitude control
-, поперечное — lateral control
-, поперечное (автопилотом) — autopilot lateral (command) control
-, последовательное — sequential control
control by completion of a series of one or more events.
- пo тангажу — pitch control
- пo углу рыскания — yaw control
-, программное — programed /scheduled/ control
-, программное (пo времени) — time(d) control
-, продольное — longitudinal control
-, продольное автопилотом — autopilot vertical (command) со ntrol
управление по вертикальной скорости или тангажу. — this control provides either vertical speed command or pitch command.
-, путевое — directional control
-, путевое (вертолетом) — helicopter directional control
путевое управление вертелетом одновинтовой схемы осуществляется изменением шага лопастей хвостового винта, вертолетом соосной схемы - разностью крутящих моментов несущих винтов, вертолетом поперечной схемы - разностью наклонов векторов тяги несущих винтов. — directional control of tingle rotor helicopter is achieved by anti-torque rotor (tail rotor), of coaxial-rotor helicopter is accomplished by differential torque between two rotors, of side-by-side rotor helicopter is obtained by differential tilt of rotor thrusts.
-, путевое (на земле) — directional control
выдерживать направление движения при пробеге при помощи тормозов, руля направления, управлением носового колеса и обратной тягой. — maintain directional control with brakes, rudder, nosewheel steering and reverse thrust.
- расходом топлива — fuel management
- расходом (и перекачкой) топлива из баков — fuel management
- реверсированием шага (возд.) винта — propeller reverse-pitch control
- реверсом тяги — thrust reverser control
- рулем высоты — elevator control
- рулем направления — rudder control
-, ручное (ручн) — manual control (man)
- ручное (автономное) в обход "пересиливанием" автоматики — (manual) override control
- с (к-л. пульта, панели) — control from
entry of navigation data are controlled from the control display unit.
- самолетом (в полете) — airplane flight control
- самолета, электродистанционное (электропроводное) — fly-by-wire control
- забросами рулей — overeontrolling
-, сдвоенное — dual control
- силовой установкой — power plant control
- системой и контроль за ее работой (заголовок) — (system) controls and indicators
-, совмещенное — (autopilot) override control
автономное действие в обход автоматики. оперативное вмешательство летчика в управление ла, управляемого автопилотом.
-, совмещенное (от одного органа управления) — joint control
-, спаренное — dual control
- с помощью ручки (управления) — stick control
- тангажом — pitch control
- тангажом, ручное — manual pitch /elevator/ control
- топливной системой (расходом и перекачкой топлива) — fuel (system) control, fuel management
- тормозами — brake control
-, траекторное (с помощью системы траекторного или директорного управл.) — flight director control
-, тросовое (система) — cable control system
- триммером — trim tab control
-, тугое — stiff control
перекручивание тросов управления рулем высоты от рулевой машинки может вызвать тугое управление рв в полете. — the kinking of the elevator servo cables could cause stiff elevator control in flight.
-, электродистанционное (электропроводное) (ла) — fly-by-wire control (system)
-, федеральное авиационное (сша) — federal aviation agency (faa)
-, флетнерное — flettner control
управление аналогичное управлению посредством серворуля. — flettner controls do not materially differ from servo controls.
- форсажам (дв.) — power augmentation control
- циклическим шагом (несущего винта) — cyclic pitch control
синусоидальное изменение шага лопастей за один оборот несущего винта. — by cyclic pitch control the blade pitch angle is varied sinusoidally with blade azimuth position.
-, чувствительное — responsive control
- шагом (возд. винта) — (propeller) pitch control
- шасси — landing gear control
-, штурвальное (режим) — manna? (flight control)
при работе элеронов или руля направления в режиме штурвального управления, автопилот должен быть выключен. — the autopilot must not be operated while either or both the aileron and rudder is/are in manual.
- элевонами — eleven control
-, электрическое — electric control
-, электропроводное, электрическое (самолетом) — fly-by-wire control
- элеронами — aileron control
взятие у. на себя — assumption of control
органы у. — controls
органы у. (ла) — flight controls
органы у. двигателем — engine controls
передача у. (от одного члена экипажа к другому) — transfer of control (from one to another crew member)
переход на ручное у. — change-over to manual control
потеря у. — loss of control
брать у. на себя — take over /assume/ control
kbc имеет право в любое время взять управление ла на себя, поставив в известность об этом других членов экипажа. — the captain may take over (or assume) control of the airplane at any time by calling "i have control".
переходить на ручное (штурвальное) у. — change over to manual control
пилотировать с помощью автоматического у. — fly automatically, fly under ap control
пилотировать с помощью штурвального у. — fly manually
реагировать на у. — respond to controlРусско-английский сборник авиационно-технических терминов > управление (упр.)
-
10 переход на ручное управление системой
Military: system override (в обход автоматики)Универсальный русско-английский словарь > переход на ручное управление системой
-
11 пульт автономного ручного управления
Military: manual override panel (в обход автоматики)Универсальный русско-английский словарь > пульт автономного ручного управления
-
12 техническое устройство перехода на ручное управление
Military: technical override (в обход автоматики)Универсальный русско-английский словарь > техническое устройство перехода на ручное управление
-
13 с ручным управлением
1. manual2. manually operated3. mannedРусско-английский большой базовый словарь > с ручным управлением
-
14 устройство управления
1. control2. control section3. controller4. control device5. control unit6. handler7. managerРусско-английский большой базовый словарь > устройство управления
-
15 звездчатая ручка
-
16 устройство управления
Русско-английский военно-политический словарь > устройство управления
-
17 руление с ручным управлением
1. manual taxiing2. manual taxingАвиация и космонавтика. Русско-английский словарь > руление с ручным управлением
-
18 ручка
-
19 широковещательное объектно-ориентированное сообщение о событии на подстанции
GOOSE-сообщение
-
[Интент]
широковещательное объектно-ориентированное сообщение о событии на подстанции
Широковещательный высокоскоростной внеочередной отчет, содержащий статус каждого из входов, устройств пуска, элементов выхода и реле, реальных и виртуальных.
Примечание. Этот отчет выдается многократно последовательно, как правило, сразу после первого отчета с интервалами 2, 4, 8,…, 60000 мс. Значение задержки первого повторения является конфигурируемым. Такой отчет обеспечивает выдачу высокоскоростных сигналов отключения с высокой вероятностью доставки.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]
общие объектно-ориентированные события на подстанции
-
[ ГОСТ Р МЭК 61850-7-2-2009]
GOOSE
Generic Object Oriented Substation Event (стандарт МЭК 61850-8-1)
Протокол передачи данных о событиях на подстанции.
Один из трех протоколов передачи данных, предлагаемых к использованию в МЭК 61850.
Фактически данный протокол служит для замены медных кабельных связей, предназначенных для передачи дискретных сигналов между устройствами.
[ Цифровые подстанции. Проблемы внедрения устройств РЗА]EN
generic object oriented substation event
on the occurrence of any change of state, an IED will multicast a high speed, binary object, Generic Object Oriented Substation Event (GOOSE) report by exception, typically containing the double command state of each of its status inputs, starters, output elements and relays, actual and virtual.
This report is re-issued sequentially, typically after the first report, again at intervals of 2, 4, 8…60000 ms. (The first repetition delay value is an open value it may be either shorter or longer).
A GOOSE report enables high speed trip signals to be issued with a high probability of delivery
[IEC 61850-2, ed. 1.0 (2003-08)]До недавнего времени для передачи дискретных сигналов между терминалами релейной защиты и автоматики (РЗА) использовались дискретные входы и выходные реле. Передача сигнала при этом осуществляется подачей оперативного напряжения посредством замыкания выходного реле одного терминала на дискретный вход другого терминала (далее такой способ передачи будем называть традиционным).
Такой способ передачи информации имеет следующие недостатки:- необходимо большое количество контрольных кабелей, проложенных между шкафами РЗА,
- терминалы РЗА должны иметь большое количество дискретных входов и выходных реле,
- количество передаваемых сигналов ограничивается определенным количеством дискретных входов и выходных реле,
- отсутствие контроля связи между терминалами РЗА,
- возможность ложного срабатывания дискретного входа при замыкании на землю в цепи передачи сигнала.
Информационные технологии уже давно предоставляли возможность для передачи информации между микропроцессорными терминалами по цифровой сети. Разработанный недавно стандарт МЭК 61850 предоставил такую возможность для передачи сигналов между терминалами РЗА.
Стандарт МЭК 61850 использует для передачи данных сеть Ethernet. Внутри стандарта МЭК 61850 предусмотрен такой механизм, как GOOSE-сообщения, которые и используются для передачи сообщений между терминалами РЗА.
Принцип передачи GOOSE-сообщений показан на рис. 1.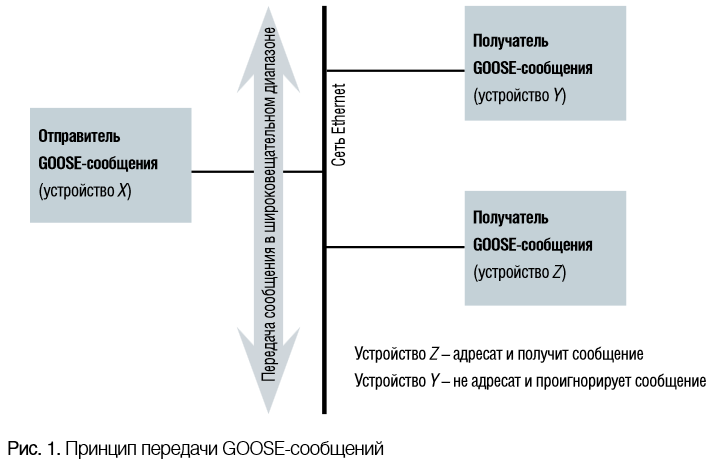
Устройство-отправитель передает по сети Ethernet информацию в широковещательном диапазоне.
В сообщении присутствует адрес отправителя и адреса, по которым осуществляется его передача, а также значение сигнала (например «0» или «1»).
Устройство-получатель получит сообщение, а все остальные устройства его проигнорируют.
Поскольку передача GOOSE-сообщений осуществляется в широковещательном диапазоне, т.е. нескольким адресатам, подтверждение факта получения адресатами сообщения отсутствует. По этой причине передача GOOSE-сообщений в установившемся режиме производится с определенной периодичностью.
При наступлении нового события в системе (например, КЗ и, как следствие, пуска измерительных органов защиты) начинается спонтанная передача сообщения через увеличивающиеся интервалы времени (например, 1 мс, 2 мс, 4 мс и т.д.). Интервалы времени между передаваемыми сообщениями увеличиваются, пока не будет достигнуто предельное значение, определяемое пользователем (например, 50 мс). Далее, до момента наступления нового события в системе, передача будет осуществляется именно с таким периодом. Указанное проиллюстрировано на рис. 2.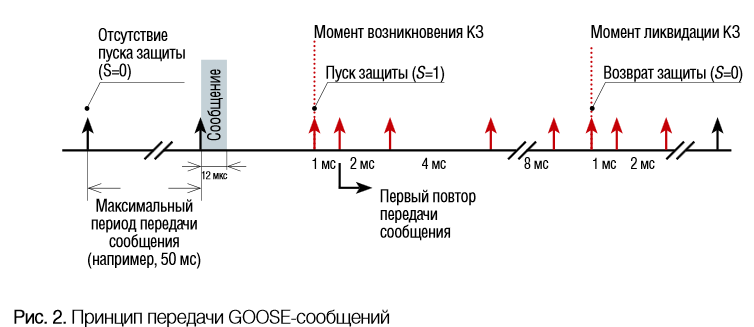
Технология повторной передачи не только гарантирует получение адресатом сообщения, но также обеспечивает контроль исправности линии связи и устройств – любые неисправности будут обнаружены по истечении максимального периода передачи GOOSE-сообщений (с точки зрения эксплуатации практически мгновенно). В случае передачи сигналов традиционным образом неисправность выявляется либо в процессе плановой проверки устройств, либо в случае неправильной работы системы РЗА.
Еще одной особенностью передачи GOOSE-сообщений является использование функций установки приоритетности передачи телеграмм (priority tagging) стандарта Ethernet IEEE 802.3u, которые не используются в других протоколах, в том числе уровня TCP/IP. То есть GOOSE-сообщения идут в обход «нормальных» телеграмм с более высоким приоритетом (см. рис. 3).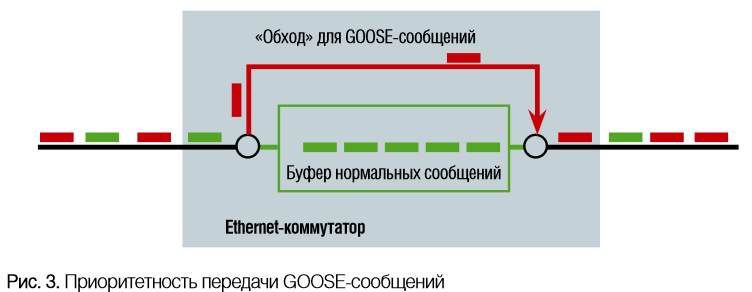
Однако стандарт МЭК 61850 декларирует передачу не только дискретной информации между терминалами РЗА, но и аналоговой. Это означает, что в будущем будет иметься возможность передачи аналоговой информации от ТТ и ТН по цифровым каналам связи. На данный момент готовых решений по передаче аналоговой информации для целей РЗА (в рамках стандарта МЭК 61850) ни один из производителей не предоставляет.
Для того чтобы использовать GOOSE-сообщения для передачи дискретных сигналов между терминалами РЗА необходима достаточная надежность и быстродействие передачи GOOSE-сообщений. Надежность передачи GOOSE-сообщений обеспечивается следующим:- Протокол МЭК 61850 использует Ethernet-сеть, за счет этого выход из строя верхнего уровня АСУ ТП и любого из устройств РЗА не отражается на передаче GOOSE-сообщений оставшихся в работе устройств,
- Терминалы РЗА имеют два независимых Ethernet-порта, при выходе одного из них из строя второй его полностью заменяет,
- Сетевые коммутаторы, к которым подключаются устройства РЗА, соединяются в два независимых «кольца»,
- Разные порты одного терминала РЗА подключаются к разным сетевым коммутаторам, подключенным к разным «кольцам»,
- Каждый сетевой коммутатор имеет дублированное питание от разных источников,
- Во всех устройствах РЗА осуществляется постоянный контроль возможности прохождения каждого сигнала. Это позволяет автоматически определить не только отказы цифровой связи, но и ошибки параметрирования терминалов.
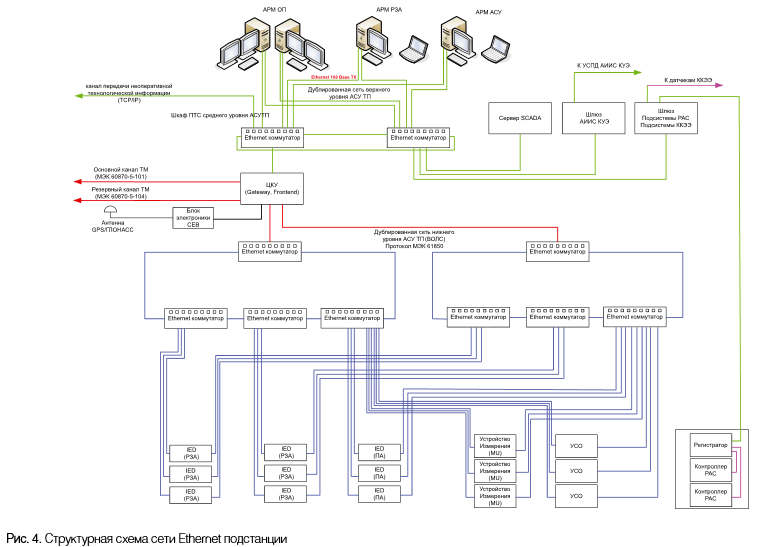
На рис. 4 изображен пример структурной схемы сети Ethernet (100 Мбит/c) подстанции. Отказ в передаче GOOSE-сообщения от одного устройства защиты другому возможен в результате совпадения как минимум двух событий. Например, одновременный отказ двух коммутаторов, к которым подключено одно устройство или одновременный отказ обоих портов одного устройства. Могут быть и более сложные отказы, связанные с одновременным наложением большего количества событий. Таким образом, единичные отказы оборудования не могут привести к отказу передачи GOOSEсообщений. Дополнительно увеличивает надежность то обстоятельство, что даже в случае отказа в передаче GOOSE-сообщения, устройство, принимающее сигнал, выдаст сигнал неисправности, и персонал примет необходимые меры для ее устранения.
Быстродействие.
В соответствии с требованиями стандарта МЭК 61850 передача GOOSE-сообщений должна осуществляться со временем не более 4 мс (для сообщений, требующих быстрой передачи, например, для передачи сигналов срабатывания защит, пусков АПВ и УРОВ и т.п.). Вообще говоря, время передачи зависит от топологии сети, количества устройств в ней, загрузки сети и загрузки вычислительных ресурсов терминалов РЗА, версии операционной системы терминала, коммуникационного модуля, типа центрального процессора терминала, количества коммутаторов и некоторых других аспектов. Поэтому время передачи GOOSE-сообщений должно быть подтверждено опытом эксплуатации.
Используя для передачи дискретных сигналов GOOSE-сообщения необходимо обращать внимание на то обстоятельство, что при использовании аппаратуры некоторых производителей, в случае отказа линии связи, значение передаваемого сигнала может оставаться таким, каким оно было получено в момент приема последнего сообщения.
Однако при отказе связи бывают случаи, когда сигнал должен принимать определенное значение. Например, значение сигнала блокировки МТЗ ввода 6–10 кВ в логике ЛЗШ при отказе связи целесообразно установить в значение «1», чтобы при КЗ на отходящем присоединении не произошло ложного отключения ввода. Так, к примеру, при проектировании терминалов фирмы Siemens изменить значение сигнала при отказе связи возможно с помощью свободно-программируемой CFCлогики (см. рис. 5).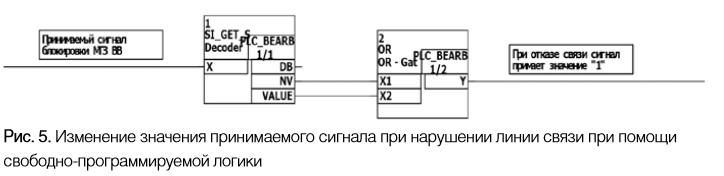
К CFC-блоку SI_GET_STATUS подводится принимаемый сигнал, на выходе блока мы можем получить значение сигнала «Value» и его статус «NV». Если в течение определенного времени не поступит сообщение со значением сигнала, статус сигнала «NV» примет значение «1». Далее статус сигнала и значение сигнала подводятся к элементу «ИЛИ», на выходе которого будет получено значение сигнала при исправности линии связи или «1» при нарушении исправности линии связи. Изменив логику, можно установить значение сигнала равным «0» при обрыве связи.
Использование GOOSE-сообщений предъявляет специальные требования к наладке и эксплуатации устройств РЗА. Во многом процесс наладки становится проще, однако при выводе устройства из работы необходимо следить не только за выводом традиционных цепей, но и не забывать отключать передачу GOOSE-сообщений.
При изменении параметрирования одного устройства РЗА необходимо производить загрузку файла параметров во все устройства, с которыми оно было связано.
В нашей стране имеется опыт внедрения и эксплуатации систем РЗА с передачей дискретных сигналов с использованием GOOSE-сообщений. На первых объектах GOOSE-сообщения использовались ограниченно (ПС 500 кВ «Алюминиевая»).
На ПС 500 кВ «Воронежская» GOOSEсообщения использовались для передачи сигналов пуска УРОВ, пуска АПВ, запрета АПВ, действия УРОВ на отключение смежного элемента, положения коммутационных аппаратов, наличия/отсутствия напряжения, сигналы ЛЗШ, АВР и т.п. Кроме того, на ОРУ 500 кВ и 110 кВ ПС «Воронежская» были установлены полевые терминалы, в которые собиралась информация с коммутационного оборудования и другая дискретная информация с ОРУ (рис. 6). Далее информация с помощью GOOSE-сообщений передавалась в терминалы РЗА, установленные в ОПУ подстанции (рис. 7, 8).
GOOSE-сообщения также были использованы при проектировании уже введенных в эксплуатацию ПС 500 кВ «Бескудниково», ПС 750 кВ «Белый Раст», ПС 330кВ «Княжегубская», ПС 220 кВ «Образцово», ПС 330 кВ «Ржевская». Эта технология применяется и при проектировании строящихся и модернизируемых подстанций ПС 500 кВ «Чагино», ПС 330кВ «Восточная», ПС 330 кВ «Южная», ПС 330 кВ «Центральная», ПС
330 кВ «Завод Ильич» и многих других.
Основные преимущества использования GOOSE-сообщений:- позволяет снизить количество кабелей вторичной коммутации на ПС;
- обеспечивает лучшую помехозащищенность канала связи;
- позволяет снизить время монтажных и пусконаладочных работ;
- исключает проблему излишнего срабатывания дискретных входов терминалов из-за замыканий на землю в цепях оперативного постоянного тока;
- убирает зависимость количества передаваемых сигналов от количества дискретных входов и выходных реле терминалов;
- обеспечивает возможность реконструкции и изменения связей между устройствами РЗА без прокладки дополнительных кабельных связей и повторного монтажа в шкафах;
- позволяет использовать МП терминалы РЗА с меньшим количеством входов и выходов (уменьшение габаритов и стоимости устройства);
- позволяет контролировать возможность прохождения сигнала (увеличивается надежность).
Безусловно, для окончательных выводов должен появиться достаточный опыт эксплуатации. В настоящее время большинство производителей устройств РЗА заявили о возможности использования GOOSEсообщений. Стандарт МЭК 61850 определяет передачу GOOSE-сообщений между терминалами разных производителей. Использование GOOSE-сообщений для передачи дискретных сигналов – это качественный скачок в развитии систем РЗА. С развитием стандарта МЭК 61850, переходом на Ethernet 1 Гбит/сек, с появлением новых цифровых ТТ и ТН, новых выключателей с возможностью подключения их блока управления к шине процесса МЭК 61850, эффективность использования GOOSE-сообщений намного увеличится. Облик будущих подстанций представляется с минимальным количеством контрольных кабелей, с передачей всех сообщений между устройствами РЗА, ТТ, ТН, коммутационными аппаратами через цифровую сеть. Устройства РЗА будут иметь минимальное количество выходных реле и дискретных входов
[ http://romvchvlcomm.pbworks.com/f/goosepaper1.pdf]
В стандарте определены два способа передачи данных напрямую между устройствами: GOOSE и GSSE. Это тоже пример наличия двух способов для реализации одной функции. GOOSE - более новый способ передачи сообщений, разработан специально для МЭК 61850. Способ передачи сообщений GSSE ранее присутствовал в стандарте UCA 2.0, являющимся одним из предшественников МЭК 61850. По сравнению с GSSE, GOOSE имеет более простой формат (Ethernet против стека OSI протоколов) и возможность передачи различных типов данных. Вероятно, способ GSSE включили в МЭК 61850 для того, чтобы производители, имеющие в своих устройствах протокол UCA 2.0, могли сразу декларировать соответствие МЭК 61850. В настоящее время все производители используют только GOOSE для передачи сообщений между устройствами.
Для выбора списка передаваемых данных в GOOSE, как и в отчѐтах, используются наборы данных. Однако тут требования уже другие. Время обработки GOOSE-сообщений должно быть минимальным, поэтому логично передавать наиболее простые типы данных. Обычно передаѐтся само значение сигнала и в некоторых случаях добавляется поле качества. Метка времени обычно включается в набор данных.
...
В устройствах серии БЭ2704 в передаваемых GOOSE-сообщениях содержатся данные типа boolean. Приниматься могут данные типа boolean, dbpos, integer.
Устоявшаяся тенденция существует только для передачи дискретной информации. Аналоговые данные пока передают немногие производители, и поэтому устоявшаяся тенденция в передаче аналоговой информации в данный момент отсутствует.
[ Источник]
Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > широковещательное объектно-ориентированное сообщение о событии на подстанции
См. также в других словарях:
испытание — 3.10 испытание: Техническая операция, заключающаяся в определении одной или нескольких характеристик данной продукции, процесса или услуги в соответствии с установленной процедурой. Источник: ГОСТ Р 51000.4 2008: Общие требования к аккредитации… … Словарь-справочник терминов нормативно-технической документации
Ту-22М — Не следует путать с Ту 22. Ту 22М … Википедия
Томск — У этого термина существуют и другие значения, см. Томск (значения). Город Томск Флаг Герб … Википедия
Российские железные дороги — Запрос «РЖД» перенаправляется сюда; см. также другие значения. Эта статья про открытое акционерное общество «РЖД», вы могли искать статью про железные дороги России. ОАО «Российские железные дороги» … Википедия
1: — Терминология 1: : dw Номер дня недели. «1» соответствует понедельнику Определения термина из разных документов: dw DUT Разность между московским и всемирным координированным временем, выраженная целым количеством часов Определения термина из… … Словарь-справочник терминов нормативно-технической документации
СТО РЖД 1.07.001-2007: Инфраструктура линии Санкт-Петербург - Москва для высокоскоростного движения поездов. Общие технические требования — Терминология СТО РЖД 1.07.001 2007: Инфраструктура линии Санкт Петербург Москва для высокоскоростного движения поездов. Общие технические требования: 3.6.1 адаптация контактной подвески: Регулировка геометрических параметров и натяжения проводов… … Словарь-справочник терминов нормативно-технической документации
Рельсовая цепь — представляет собой электрическую цепь, в которой имеется источник питания и нагрузка (путевое реле), а проводниками электрического тока служат рельсовые нити железнодорожного пути. Содержание 1 Устройство и принцип действия … Википедия
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
Москва — I Москва река в Московской и частично в Смоленской области РСФСР, левый приток Оки (бассейн Волги). Длина 502 км, площадь бассейна 17 600 км2. Берёт начало на Московской возвышенности. Питание снеговое (61%), грунтовое (27%) и дождевое… … Большая советская энциклопедия
Москва (столица СССР) — Москва. I. Общие сведения. Население М. столица СССР и РСФСР, центр Московской области. Крупнейший в стране и один из важнейших в мире политических, научных, промышленных и культурных центров, город герой. М. относится к крупнейшим по численности … Большая советская энциклопедия
Киев — У этого термина существуют и другие значения, см. Киев (значения). Город Киев укр. Київ … Википедия